



人形机器人
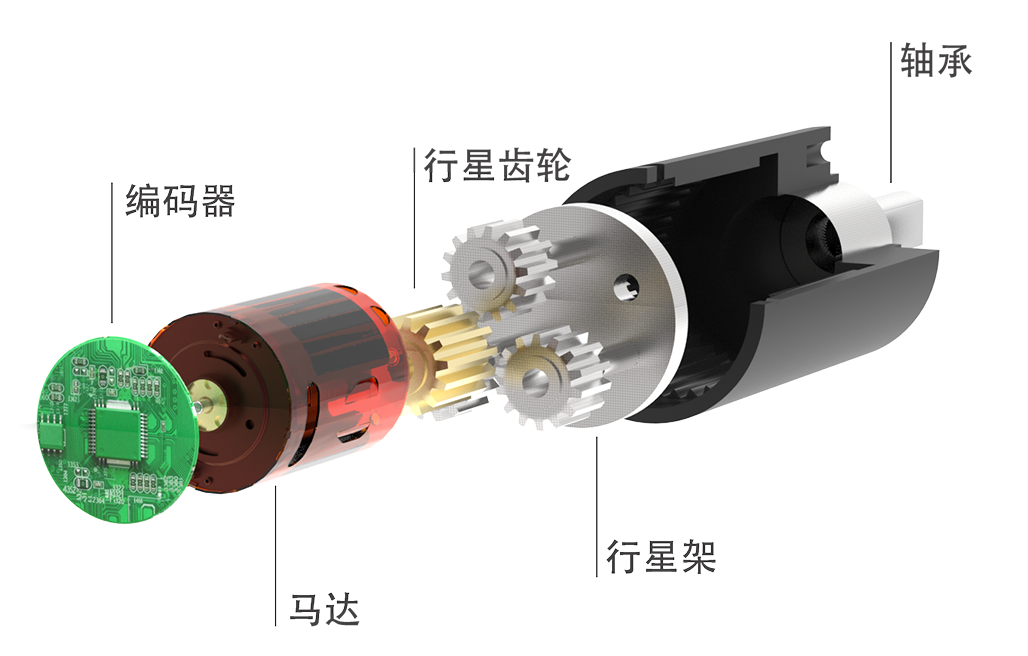
随着劳动力成本上涨、人口老龄化问题加剧,全球多国出现比较严重的制造业劳动力缺口和人力成本持续升高,对人形机器人在制造业的普及起到推动作用。人形机器人是一种模仿人类外形的机器人,除具备人形和模拟人类动作外还兼具智慧化和可交互性等特点。人形机器人主要包含三大核心技术模块:环境感知模块、运动控制模块和人机交互模块。其中位置和角度传感器(如编码器、光电传感器等)用于测量机器人关节和执行器的相对或绝对位置和角度。这些传感器为运动控制提供关键信息,确保机器人执行准确的运动轨迹。
-
01
人形机器人关节模块编码器
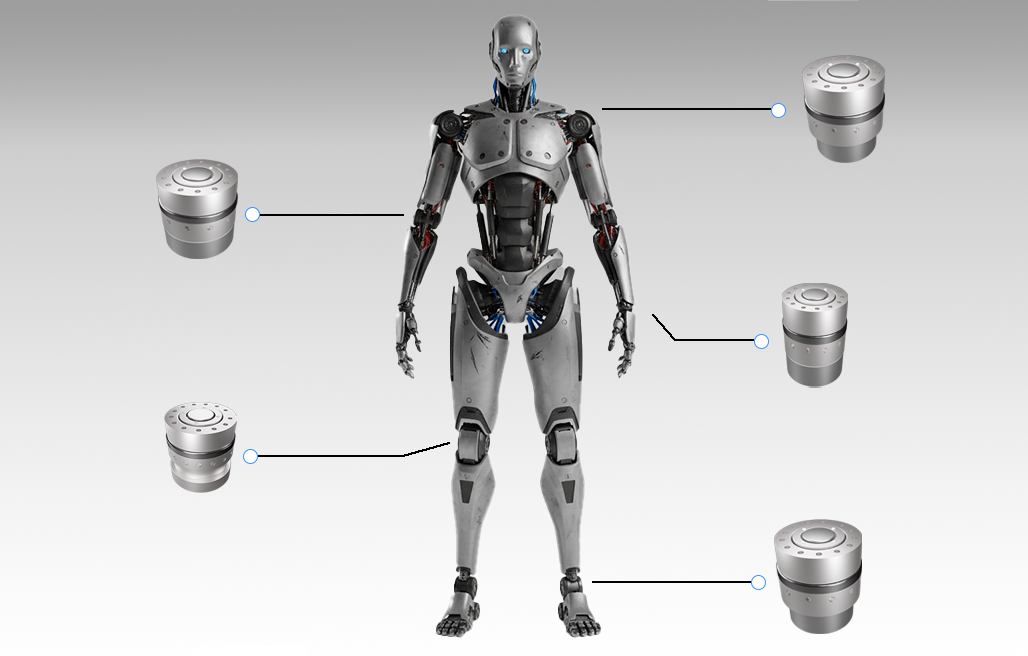
人形机器人的关节模块,通过输入传感器传输数据到驱动器,进而控制电机,并由谐波减速器放大输出力矩,输出传感器再作位置反馈、优化算法,构成了其精密而高效的运动控制系统。这些执行模组通过精确的位置和角度控制,使机器人能够实现多样化的动作和姿态。模组的协同工作,为机器人带来了出色的机动性和操作灵活性,使其能够应对各种复杂的环境和任务要求。
编码器用于测量关节角度和位置,确保机器人的运动精度和稳定性。人形机器人需要实现高度精准的运动控制,以模拟人类的动作。通过实时监测编码器反馈信息,机器人可以准确地控制肢体的运动,实现平稳的步态和灵活的动作。旋转执行模组采用双编码器主要包含电机侧的编码器和减速器输出端的编码器,两个编码器可以增加系统的动态响应,提高系统带宽,缩短响应时间并互为冗余。
-
02
编码器在机器人关节模组中的作用
人形机器人的旋转关节包括电机、谐波减速器、双编码器、力矩传感器、角接触交叉滚子轴承。电机用以产生驱动转矩,安装在机器人的关节上控制运动,是机器人的核心硬件之一。关节的输出侧和电机侧各有一个编码器。输出侧编码器用于测量输出位置的变化,电机侧编码器用于计算得到输出轴的理论位置,与输出侧编码器的数据进行对比,得到外部受力大小,从而交付驱动器进行后续控制,是影响机器人硬件成本和运动性能的关键部分。传周科技的电感编码器芯片、反射式光学编码器芯片,可依据客户的设计任意变径,增加客户产品设计的灵活性,可以为不同应用场景的客户提供高可靠性、高精度、小体积的价值。
-
03
灵巧手编码器
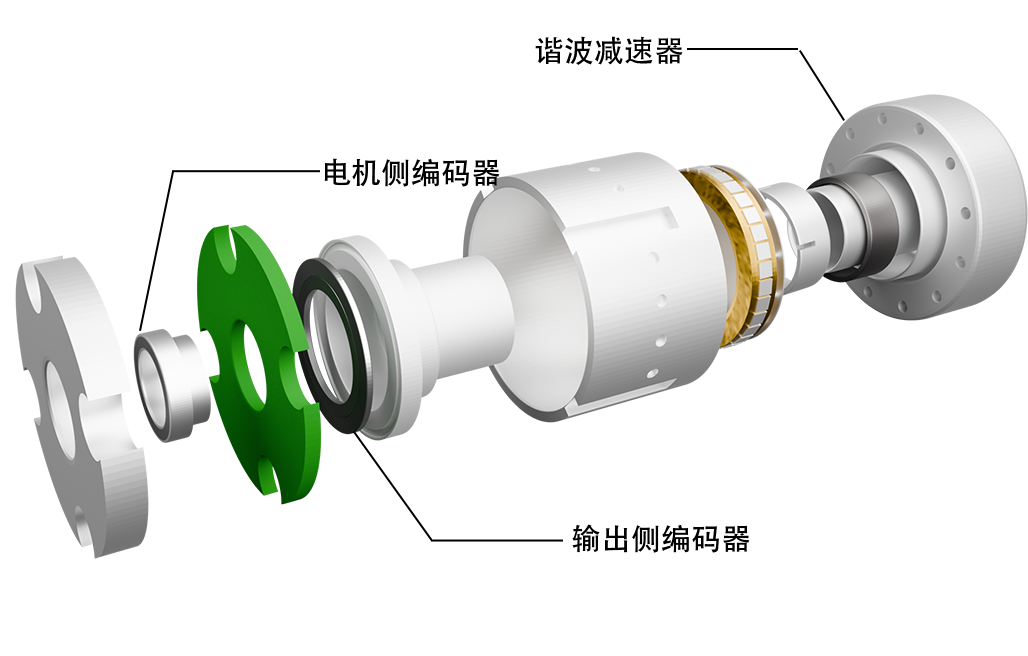
人形机器人的灵巧手是一种基于人手运动学设计的特殊末端执行器,主要由驱动器+编码器+传感器+空心杯电机+行星减速箱+蜗杆蜗轮组成,具备自适应和悬停保持能力,可承重一定重量、使用工具、精确抓取零件。灵巧手能够实现高度敏感和灵活的运动,为实现复杂的抓取和操作任务提供了坚实的基础。

-
04
空心杯电机编码器
空心杯电机是人形机器人灵巧手的关键部件,具有良好的节能效果、动力性能以及控制性能。空心杯电机是一种采用无铁芯转子的直流永磁伺服控制电机,由于采用无铁芯转子结构空心杯电机消除了因铁芯形成涡流而造成的电能损耗,同时其重量和转动惯量大幅降低,减少了转子自身的机械能损耗,大幅提高了电机的运转性能。在机器人灵巧手领域,会要求灵巧手的手指关节轻量化、高精度,空心杯电机主要用于机械关节控制,力度控制更精准灵敏。传周科技的反射式光学编码器,尺寸仅为3*3*0.9mm,并可选数字量或模拟量输出,尺寸小、精度高,完美契合灵巧手应用。
相关产品
-
 TVOERH080P光电编码器芯片
TVOERH080P光电编码器芯片TVOERH080P是增量型反射式光电编码器芯片,内置LED,提供模拟或数字ABZ输出
了解更多


-
 TVOERA127A光电编码器芯片
TVOERA127A光电编码器芯片TVOERA127A光学反射式绝对编码器芯片,集成蓝光LED芯片和两个PD阵列,在宽松的对准公差下获得了卓越的信号保真度
了解更多
-
 TVOERH080M光电编码器芯片
TVOERH080M光电编码器芯片TVOERH080M是一款无透镜的微型高精度反射式增量光电编码器芯片,结构紧凑,高度集成。
了解更多
-
 TVHEPAC00A电感式编码器芯片
TVHEPAC00A电感式编码器芯片该芯片是一款无磁铁的电感编码器芯片,采用涡流检测原理,通过PCB印刷线圈实现金属靶标的高精度位置感应。该芯片适用于高速绝对位置检测,其无磁铁设计可以降低成本,同时具备优异的抗干扰能力,满足汽车、工业及医疗等严苛环境的应用需求,适用于无刷直流电动机的转子位置检测、替换旋转变压器等。
了解更多
-
 TVHECHL00X全集成式电感编码器芯片
TVHECHL00X全集成式电感编码器芯片TVHECHL00X是传周微型电感式编码器芯片系列,利用片上线圈技术,内置初级和次级线圈、线圈放大器、乘法器,产生正余弦信号,正弦和余弦信号可以作为输出信号提供
了解更多








