



车载激光雷达
激光雷达被大多数整车厂认为是L3级及以上自动驾驶必备的传感器。激光雷达兼具测距远、角度分辨率优、受环境光照影响小的特点,且无需深度学习算法,可直接获得物体的距离和方位信息,这些相较于其他传感器的优势,可显著提升自动驾驶系统的可靠性。从结构上看,车载激光雷达由四部分组成,即发射激光的发射模块、对特定区域进行扫描的扫描模块、探测回光的接收模块和对点云数据进行处理并反馈的控制模块,其中扫描模块的扫描部件目前主流为机械式。
-
01
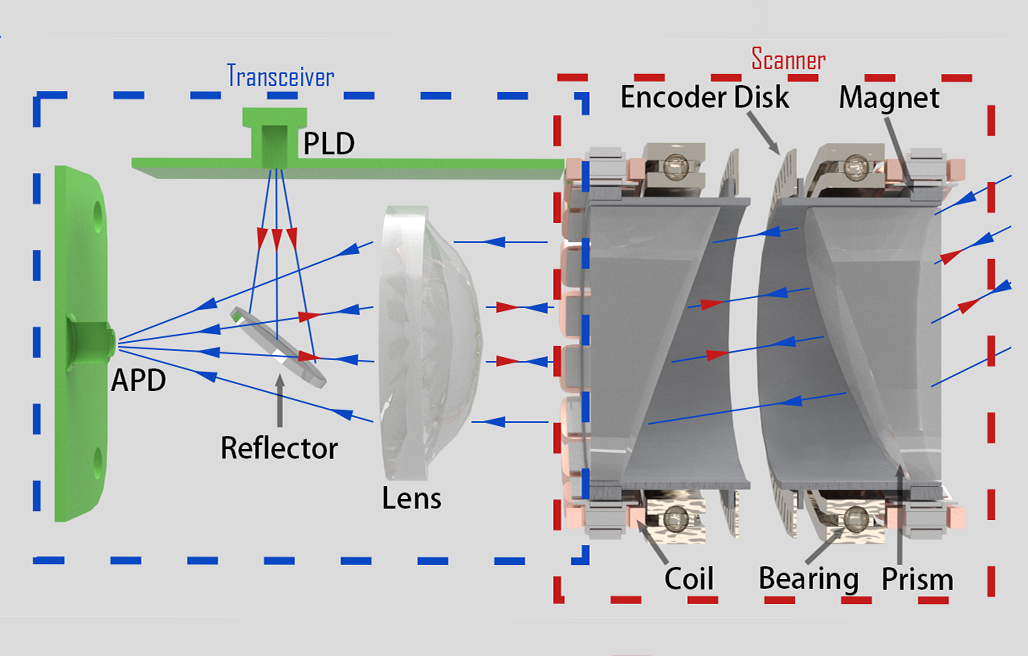
双光楔扫描激光雷达编码器
双光楔(棱镜)在电机的带动下进行高速旋转,可以产生不同角度的折射光线,激光在通过第一个楔形棱镜后发生第一次偏转,通过第二个楔形棱镜后发生第二次偏转,只要控制两面棱镜的相对转速便可以控制激光的扫描形态,产生不同角度的折射光线,从而实现视场角范围内激光线束的覆盖。在这个应用中,两面棱镜的转速控制至关重要,传周科技的编码器解决方案精度高、体积小,可以最大程度的减少点云畸变和模组体积。编码的最高响应频率可达2MHz,支持电机以更高的转速旋转从而获得更高的扫描线数。
-
02
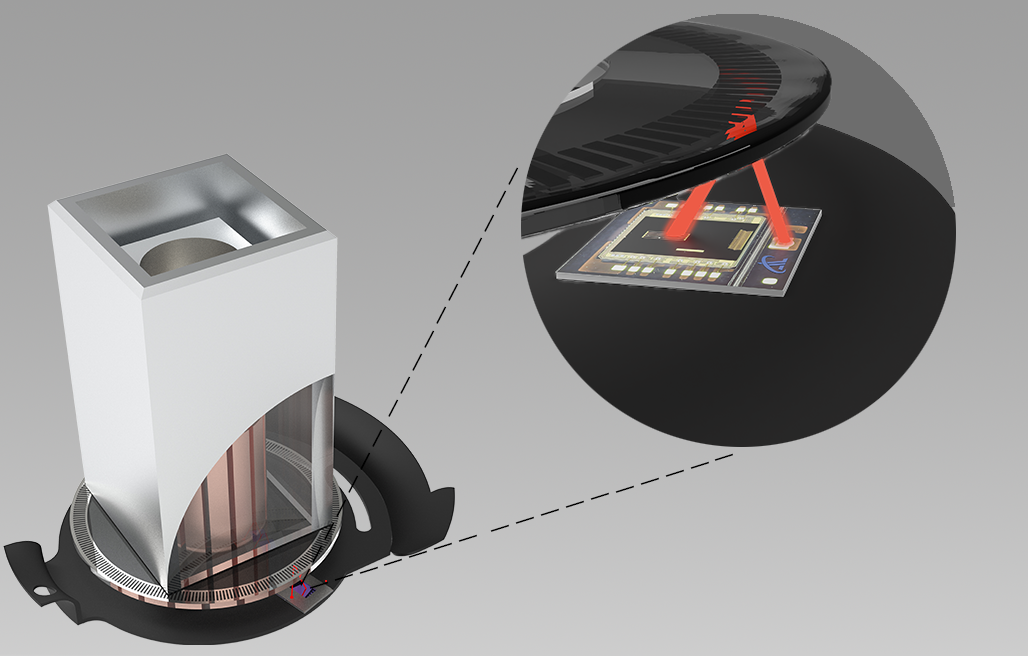
机械转镜激光雷达编码器
在车载激光雷达中,转镜通常被安装于雷达的一侧,与激光的发射和接收装置相对独立。这种结构不仅保持了装置的稳定性,还有效降低了成本。转镜式激光雷达的显著优势在于其稳定的性能和较低的成本。由于转镜技术已经经过了长时间的验证和优化,其在制造和供应链方面相对成熟。传周半导体的反射式编码器方案,编码器整体厚度可以做到2.5mm,帮助客户节约宝贵内部空间,可选的模拟量或数字量输出,支持客户后续做高分辨率的插值细分,速度误差小、点云失真小。
相关产品
-
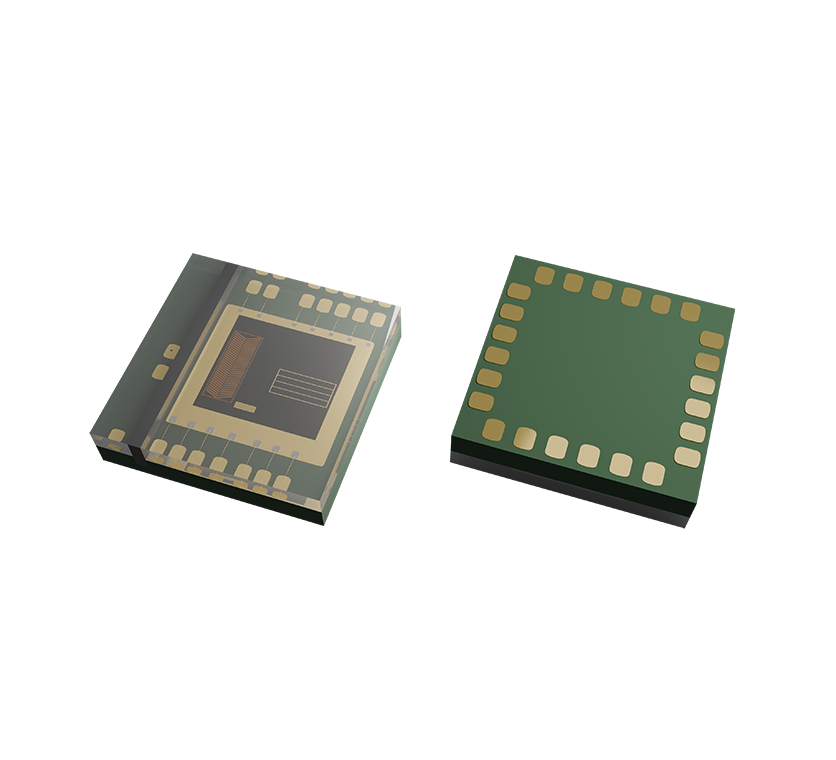 TVOERH300P光电编码器芯片
TVOERH300P光电编码器芯片TVOERH300P 是增量型反射式光电编码器芯片,内置LED,提供模拟或数字ABZ输出
了解更多


-
 TVOERA127A光电编码器芯片
TVOERA127A光电编码器芯片TVOERA127A光学反射式绝对编码器芯片,集成蓝光LED芯片和两个PD阵列,在宽松的对准公差下获得了卓越的信号保真度
了解更多
-
 TVOERH300M光电编码器芯片
TVOERH300M光电编码器芯片TVOERH300M是一款无透镜的微型高精度反射式增量光电编码器芯片,结构紧凑,高度集成。
了解更多
-
 TVHEPAC00A电感式编码器芯片
TVHEPAC00A电感式编码器芯片该芯片是一款无磁铁的电感编码器芯片,采用涡流检测原理,通过PCB印刷线圈实现金属靶标的高精度位置感应。该芯片适用于高速绝对位置检测,其无磁铁设计可以降低成本,同时具备优异的抗干扰能力,满足汽车、工业及医疗等严苛环境的应用需求,适用于无刷直流电动机的转子位置检测、替换旋转变压器等。
了解更多
-
 TVHECHL00X全集成式电感编码器芯片
TVHECHL00X全集成式电感编码器芯片TVHECHL00X是传周微型电感式编码器芯片系列,利用片上线圈技术,内置初级和次级线圈、线圈放大器、乘法器,产生正余弦信号,正弦和余弦信号可以作为输出信号提供
了解更多








